I won’t sugar coat it. Building your own system is complicated. Many people therefore buy a kit or per-configured system.
I do hope you can find a few others to join with you and try it out though, sharing the costs of construction. They are FUN in that the instant acceleration cannot be matched and is very addictive. But for long running the energy density of hydrocarbons cannot be matched.
Can you please explain in more detail what you are doing to make it more efficient? I’d love to learn. Both my grandads had professions that related to electricity one way or another, but those genes didn’t get passed on to me
Prototype EKartGo Model 1 motor size comparison to DHX Peregrine 60
The P60 has a 1" shaft, is water cooled, and is a 3-phase 144 volt 250 amp SMPM motor making about 34.5 kW continuous at 7,200 RPM with a peak 120 Nm torque.
The Model 1 prototype currently has a 3/4" shaft, is air cooled, and is a 8-pole “4-phase” 40 volt 3.9 amp max SFPM motor which should make about 31.5 kW continuous at 10,500 RPM with a peak 38.5 Nm torque.
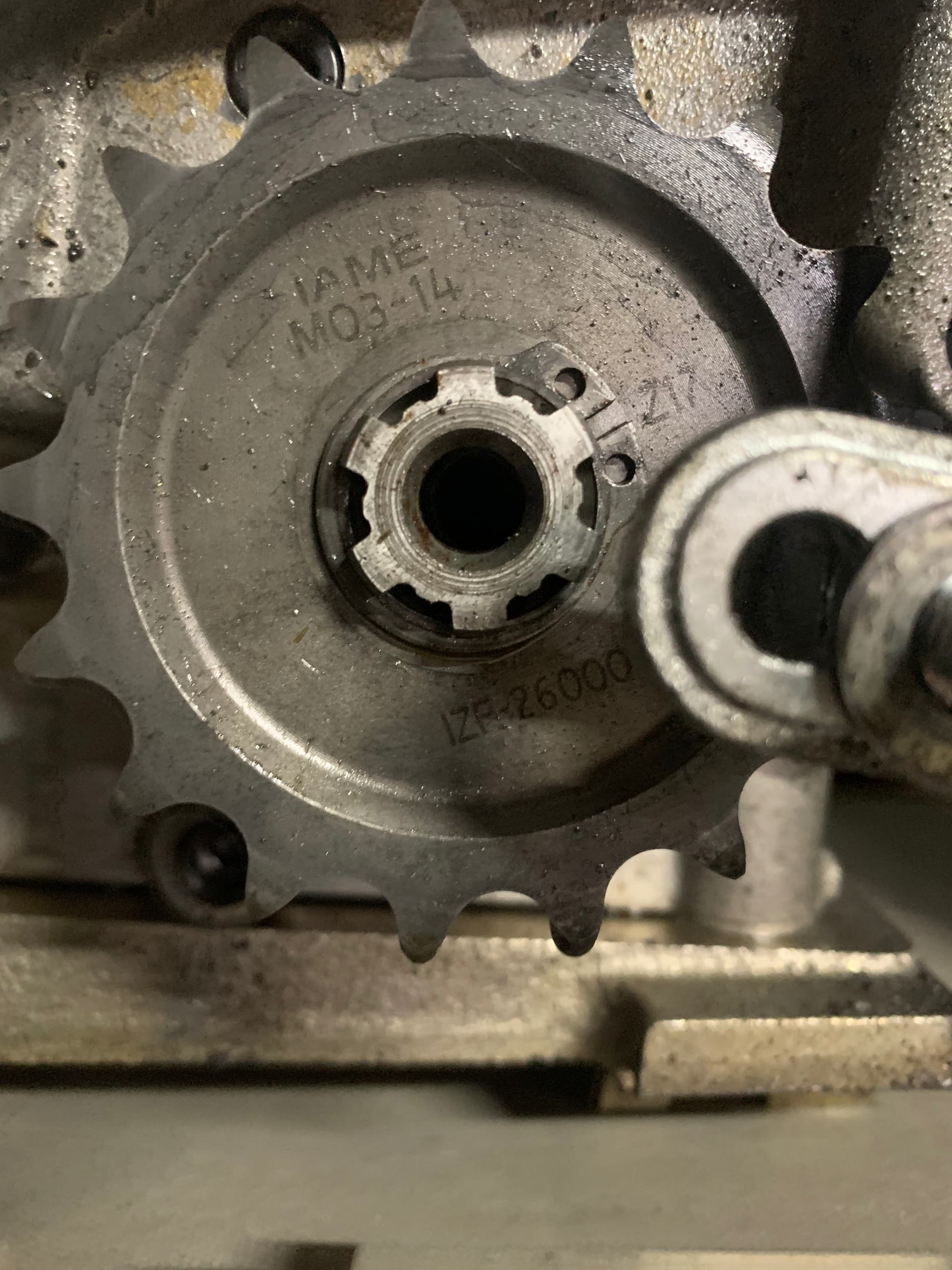
The shaft is 20.0mm in diameter from outer to outer, and 16mm in diameter across the inner part of the splines. Measured using a digital caliper. Hopefully this helps.
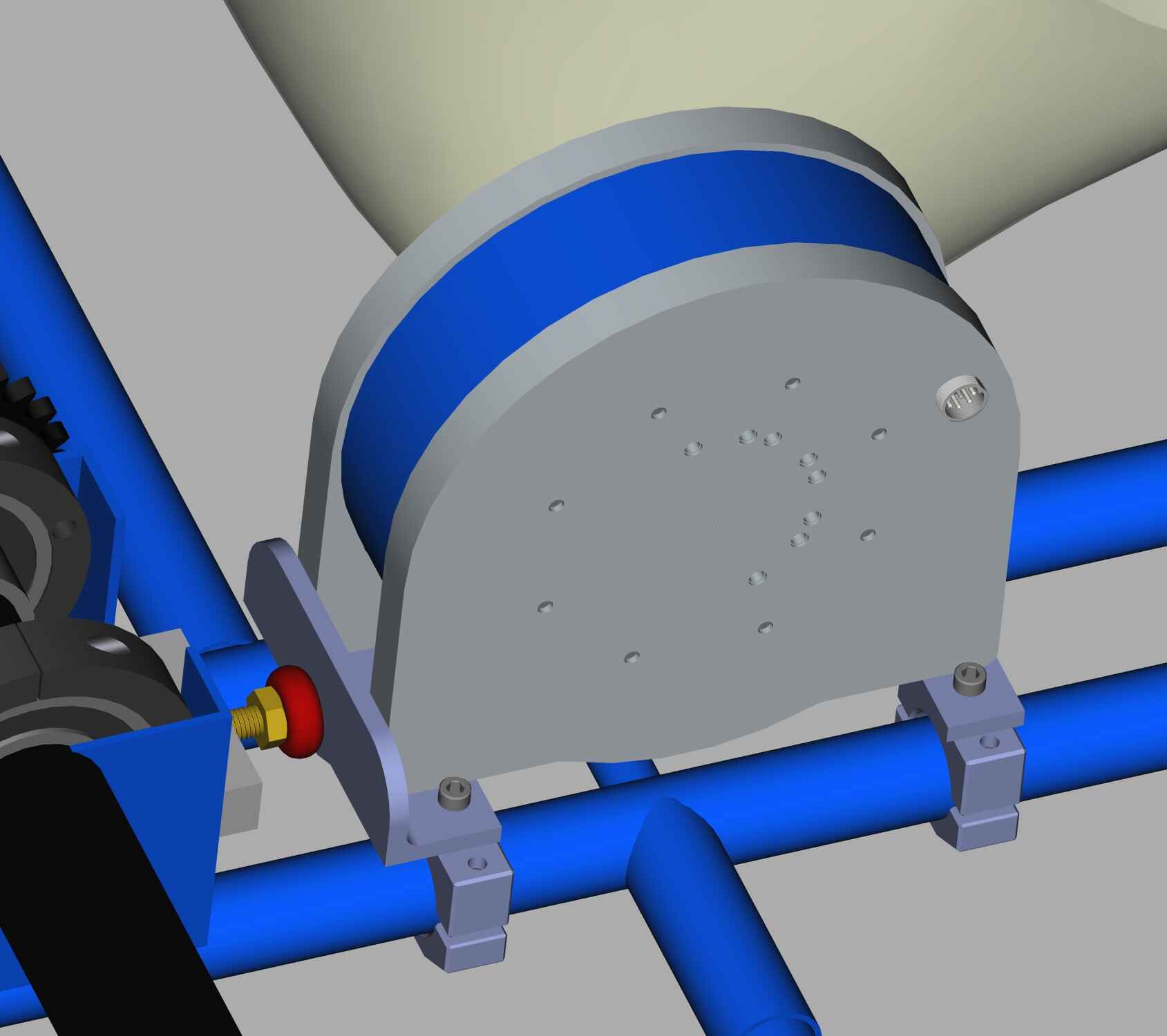
While work was slow today (probably slower due to the snow storm), I worked on motor mounting ideas in solidworks, and then copied the STEP assembly file back into freecad to put it on the frame. The bottom holes through the motor body were a bad idea. Too close together and would let dust and moisture get in the motor.
Anyhow, I think this will work - about as simple as I could make it. Just a few other items to tie down before sending the files off to get CNC parts made ($$$). BTW, those half-circle holes will be covered by a small circuit board on the side with the optical receivers that tell my controller the current rotor position.
That’s one of things I need to update today as I get time. I am waiting for answer from Fictiv customer service on what the minimum inside radius was and smallest hole size. New user questions for sure, but hey that’s just one of the new hats I’m wearing for this project.
what’s the measurement on the depth of the corners? for a 1/64 the deepest length of cut I can think of is 1/8. 1/32 is probably also gonna be 1/8 at best. easiest and cheapest thing would be mouse earing the corner
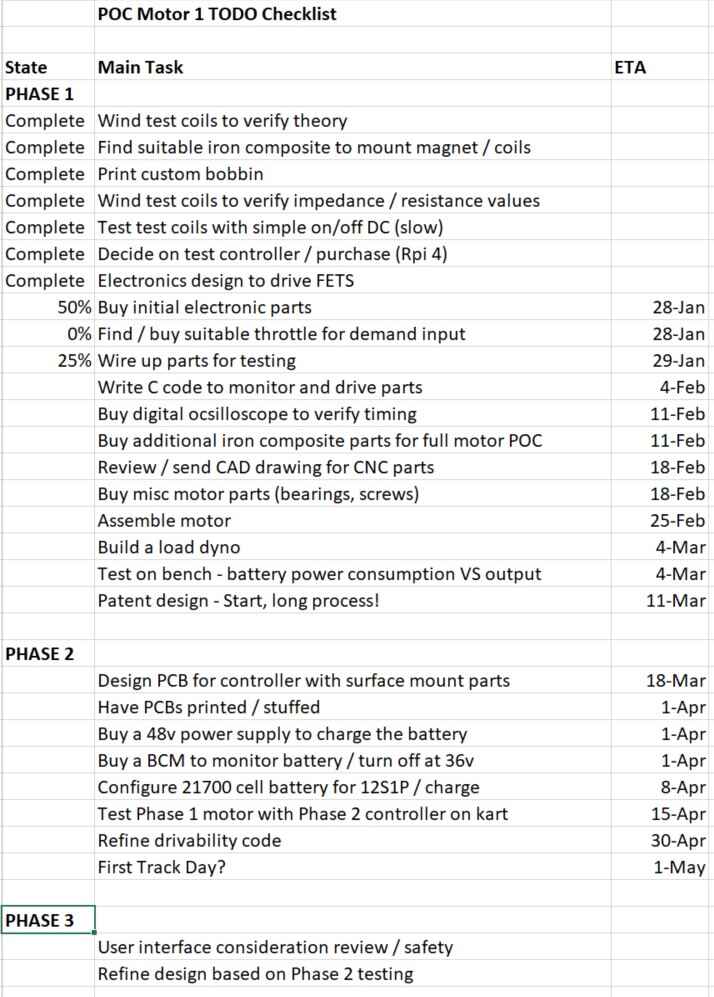
When taking on a project to create a new motor design, controller, and software from the ground up, here are a few of the hats you will need to wear and things to learn:
Electromagnetic principals
Permanent magnetic principals
Phenolic mix vs used frequencies
Coil design and construction
3D Cad for case design
Material design for stress and size changes due to heat
Machinist fits and tolerances for CNC
Electronic design for FET power switching
Microcontroller timing and interfacing
Positional input from motor (Hall, sin/cos, optical)
Software design for load based systems
Battery monitoring for safety