I’ve opened another can of worms for myself, friction circles. After viewing the AiM video “Understanding the Friction Circle”, thought I’d give it a try. Clear to me now that I don’t understand friction circles. Picked the fastest lap of a session and then isolated the graph to one segment of the session at a time. Expected to see nice clean arcs on the graph as the kart transitioned around a corner. But the graph shows loops, circles and zig-zags. What am I seeing? Assuming some of the irregularities in the graph are caused by the track. But the others I’m assuming are driver input and the kart not performing properly. How do I determine cause and effect? Is there any reference material I can turn to? Using the Lat and Long GPS data from a Mychron 5
I too have tried to utilize friction circles, but ended up going back to lateral and lon. g. Just my personal preference, I feel I can see what I need to see in both of those just fine.
Have this open while you go through your data.
Nik,
Thanks. It’s cold and snowing here. Going to pour myself an adult beverage and study the info in your link.
If you are enjoying it, there’s more “track sessions” here;
http://www.aim-sportline.com/eng/download/on-track-sessions.htm
thanks, I’ll that a try
I know I’m coming in late here - but in case anyone is perusing through I figured it’d be good to share anyways.
The Mychron 5 has a few little issues when looking at traction circles. GPS Lat and Lon acc are taken by the heading of the vehicle and the parallel acceleration vector is LonAcc and perpindicular is LatAcc - so here’s where the problem comes in with the 5 - the GPS module and, as a result, the compass are inside of the head unit itself. This means that it turns when you turn the wheel… the sensor turns with it which makes your LatAcc and LonAcc readings slightly off.

blue is a mychron 4 with a GPS08 external module white is Mychron 5 on the same track. Top line is G_Sum, Middle is longitudinal acceleration, lower is lateral. You can see how the readings are substantially less smooth and you can see how the sum spikes or dives at every point in the corner that the wheel would turn - it spikes at initial input, spikes as the driver puts the last tick of max in at the apex, and spikes again at the unwind. Shows off what I’m taking about with the traction circle too.
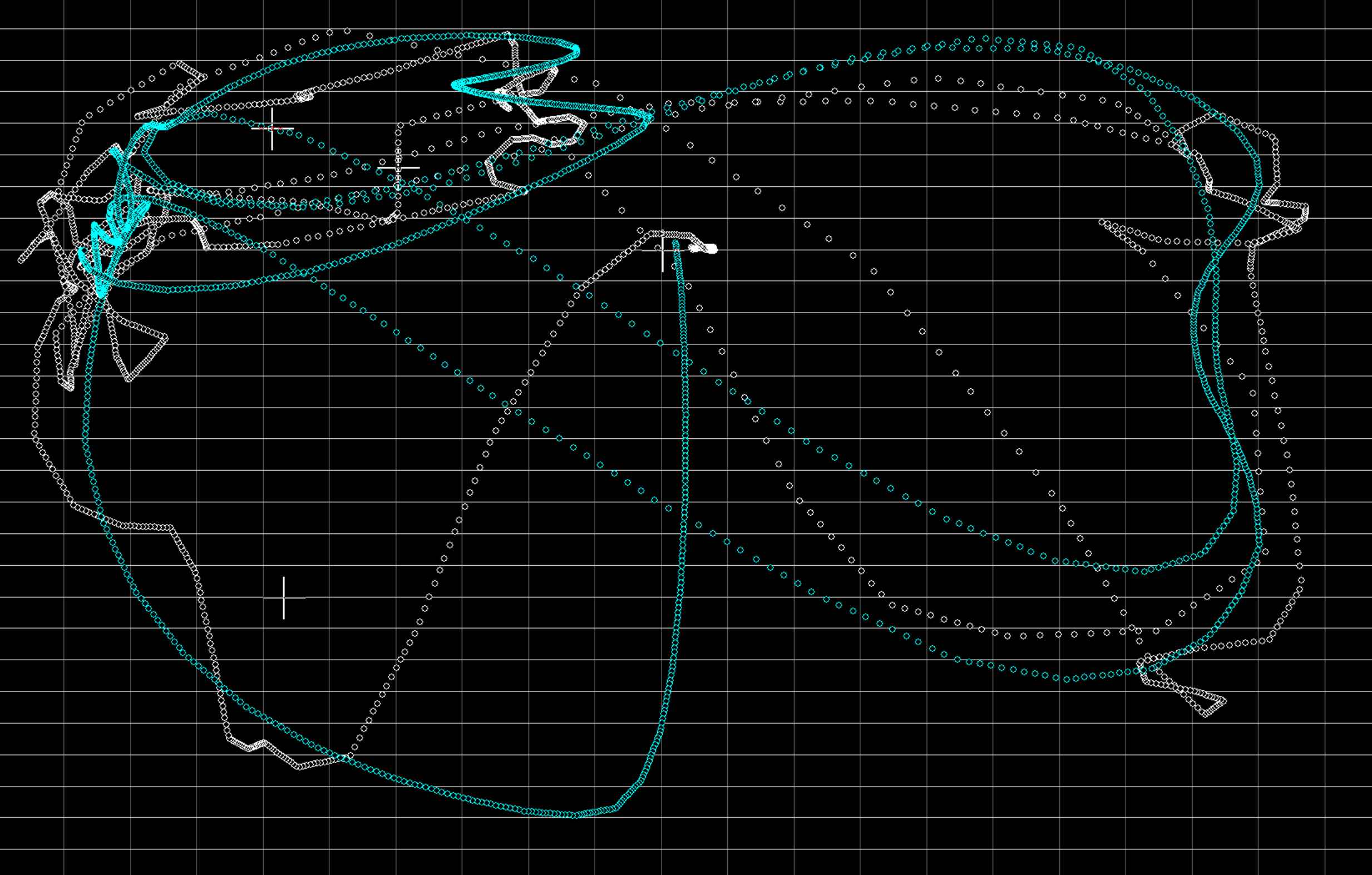
Here’s the respective difference in traction circles. You can see how the white line has a lot of weird bits in it around changes in concavity how it does those little loops. It’s a faux-slip condition - it doesn’t actually slip there based on what you can see in real life - and the same values logged by the 4+GPS08 show that as well.
You can’t really use the Mychron 5 for doing friction circle analysis is my original point. The sensing scheme is just a little off for that in depth of analysis. It has a lot of perks - the 5 is really great when it comes to ease of use, quick comparisons of macro-level data, team management, it’s a more robust computer… But it isn’t better at everything.
Iinteresting, I had wondered the same thing myself.
Thank you. That explains the squiggles that I thought shouldn’t or couldn’t be.
No worries - glad I could share some insight. 
Andy,
Is it possible to connect a GPS module to a 5 and use it external to the integrated accelerometer? I love the convenience of the 5, your point about the steering is an interesting one, something I had considered but never really internalized until I read your comment.
Thanks for any input!
Have you ever tried two GPS units at either end of the kart, I’m not sure they have the accuracy in the GPS units. But back in my automotive engineering days we would use something like a VBox with dual antennas so we could accurately measure slip and pitch/roll.
Not sure it could be done with any of the on the market kart boxes but maybe you’ve tried it with motec (if i’ve confused you with someone else who used to work with motec, i’m sorry).
Well, better late than never I suppose. I didn’t see this until now. So you can plug a GPS module in, but the problem is that the mychron doesn’t have changeable CAN messaging. It sees the module but doesn’t log anything. As far as I can tell, it would work if you could turn off the internal GPS, but that isn’t possible.
Yeah I wonder if a kart is simply just to short for the GPS to work well. Gyros probably would though.