So we had a few talks about Alfanos and Mychrons, and I have been wondering if I could make my own.
Thanks to Racebox that released their Micro product and to this thread : Showcase: My DIY Racing Laptimer/Datalogger - Product Design - Arduino Forum, I decided to take on this journey.
My only skills were software programing, so I needed to learn about 3D modeling and printing which I haven’t done before.
THE GOAL :
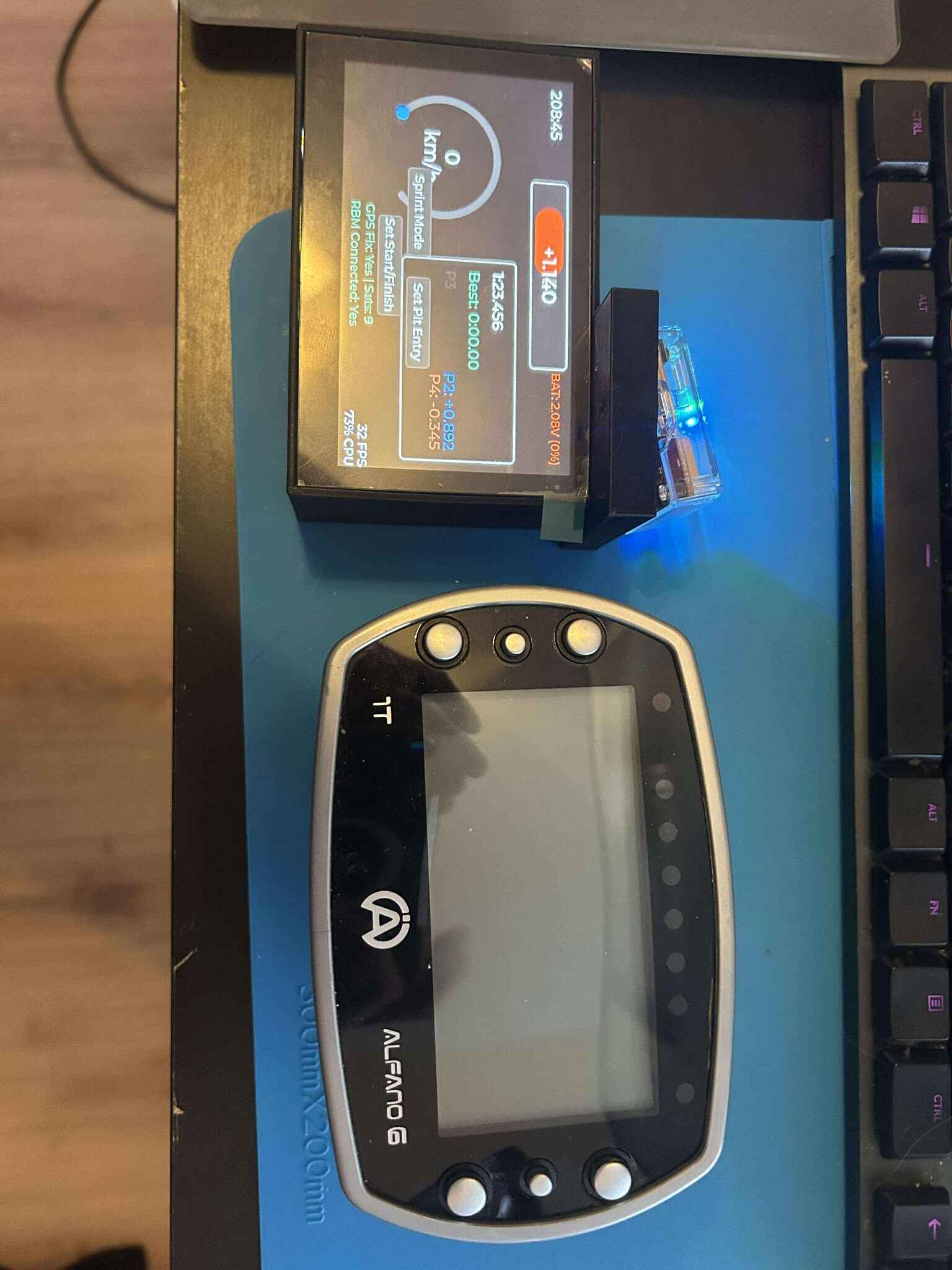
1st step : Having a fully functional datalogger leveraging the Racebox Micro. Allowing me to record the best lap, have a delta bar iRacing style, have a speedometer and a stint timer. Has to detect start/finish line as well as pit entry/exit for endurances. Must be battery powered for at least 6 hours.
2nd step : Allowing the datalogger to connect to the internet using my phone as a router, so the pit crew can send messages directly to the datalogger. Also the datalogger will retrieve data for the Apex Timing system so it can show Pn-1/Pn+1 time deltas.
THE HARDWARE :
Waveshare ESP32-S3 MCU with a 4.3 inches LCD touch screen. It comes with an SD slot, JST PH2.0 input for LiPo battery, CAN, Sensor and I2C inputs. It is also Bluetooth and Wifi capable. All of that for the prices of 35 USD
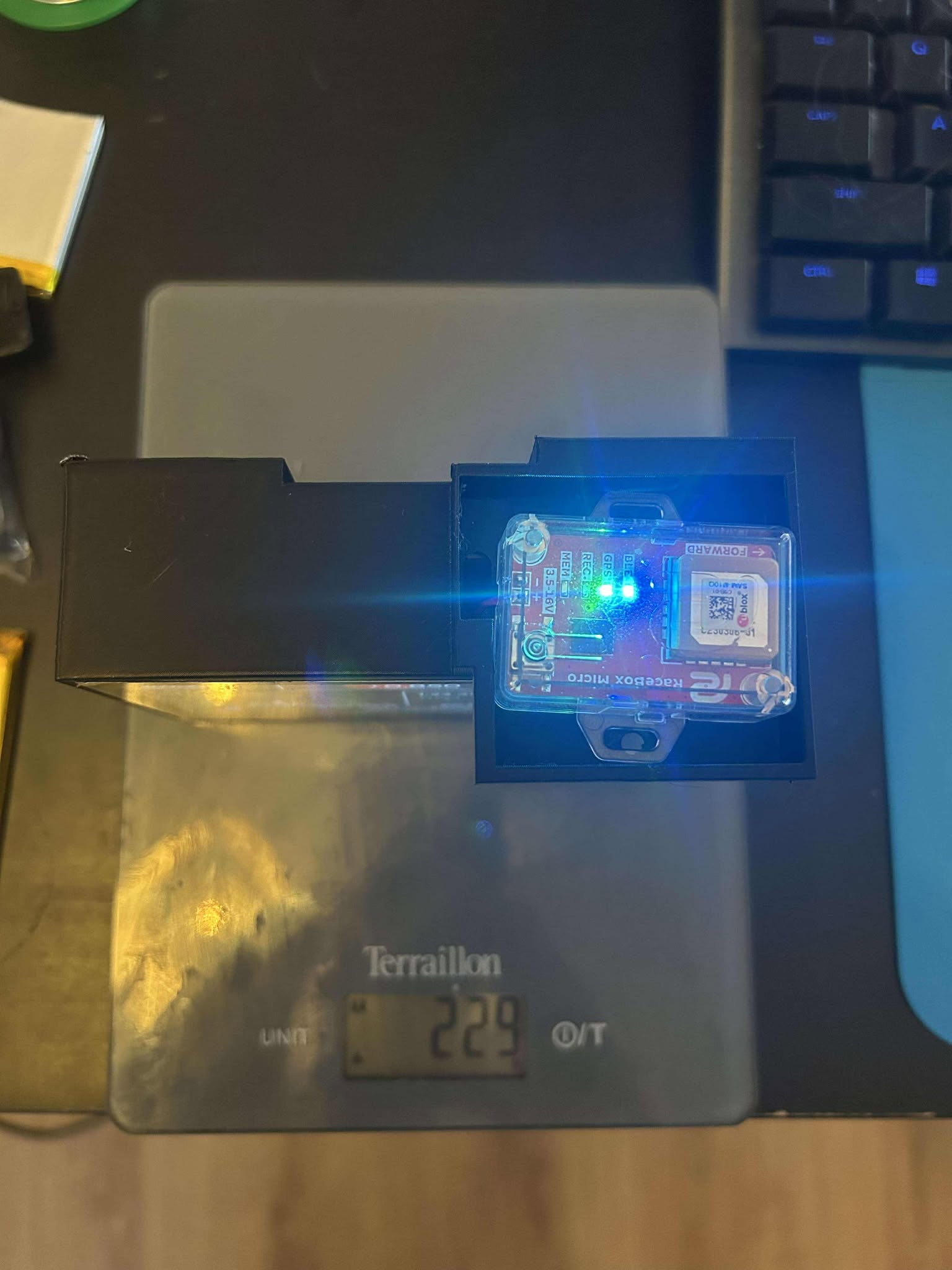
Racebox Micro. Powers up using a JST-XH 2.54 connection, then uses Bluetooth to send its data.
5000mAh LiPo battery. Might extend to 10/15Ah if needed, but for the prototype I won’t bother yet.
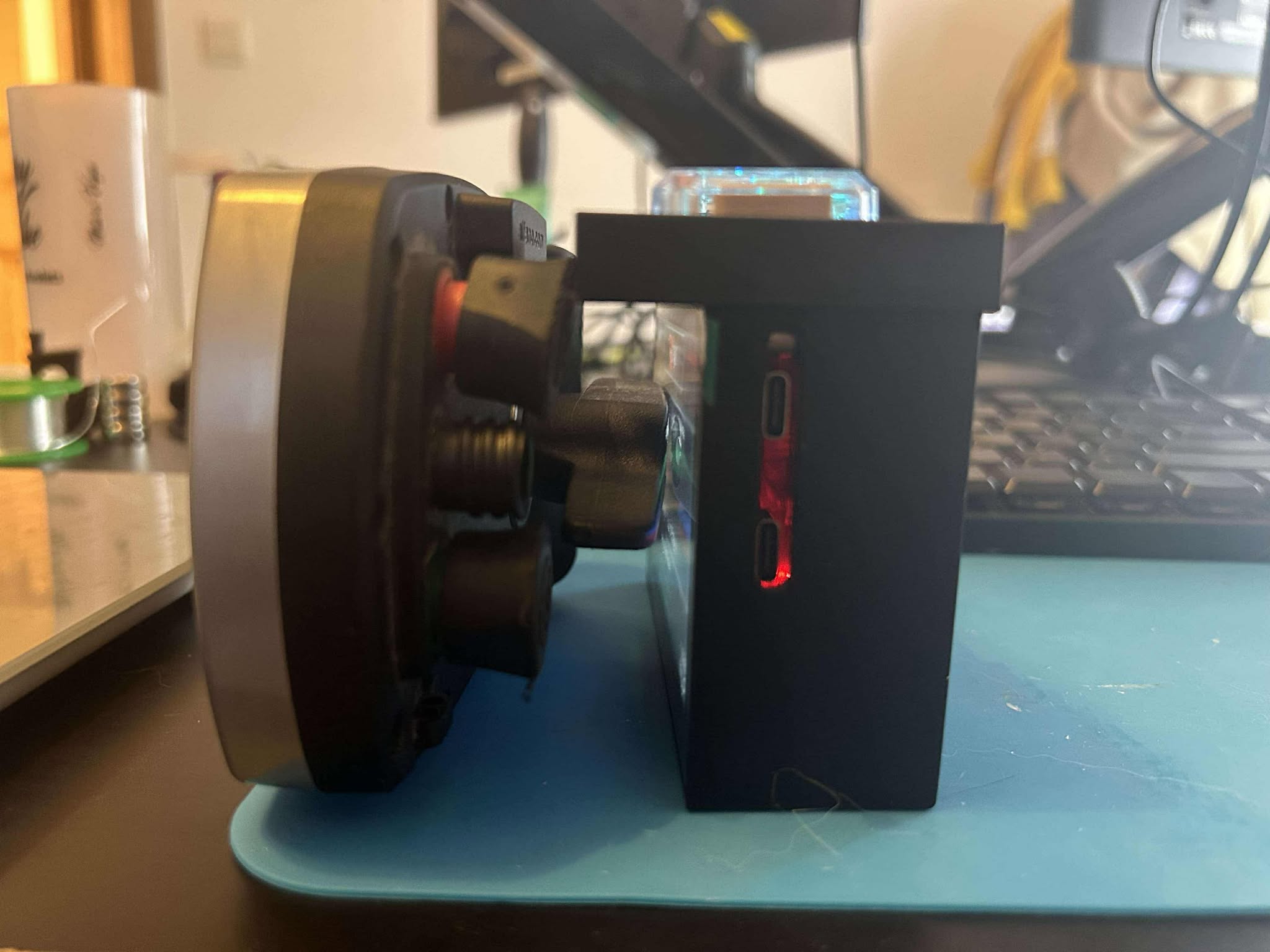
3D printed case. So I bought a Bambu Lab A1 mini for 180 USD thanks to their holiday sales. This will allow me to print the prototypes first in PLA, then in PETG for real-world testing.
THE SOFTWARE :
Fortunately, I only had to use free software for this. Leveraging Arduino and Waveshare libraries, I was able to create a software for the datalogger very easily. I wouldn’t recommend if you are not a SoftEng though. I used FreeCAD to create the case for the datalogger. It is very simple to use and I got a prototype done in a few hours.
THE MOUNTING SYSTEM :
For now, I will go with a magnetic clamp for the Sodi Sport steering. I got 4 Neodyme magnets that can each hold up to 20kg of force. This is the part where I still have the most work to do though, so I am open to suggestions !
V0.1 Prototype
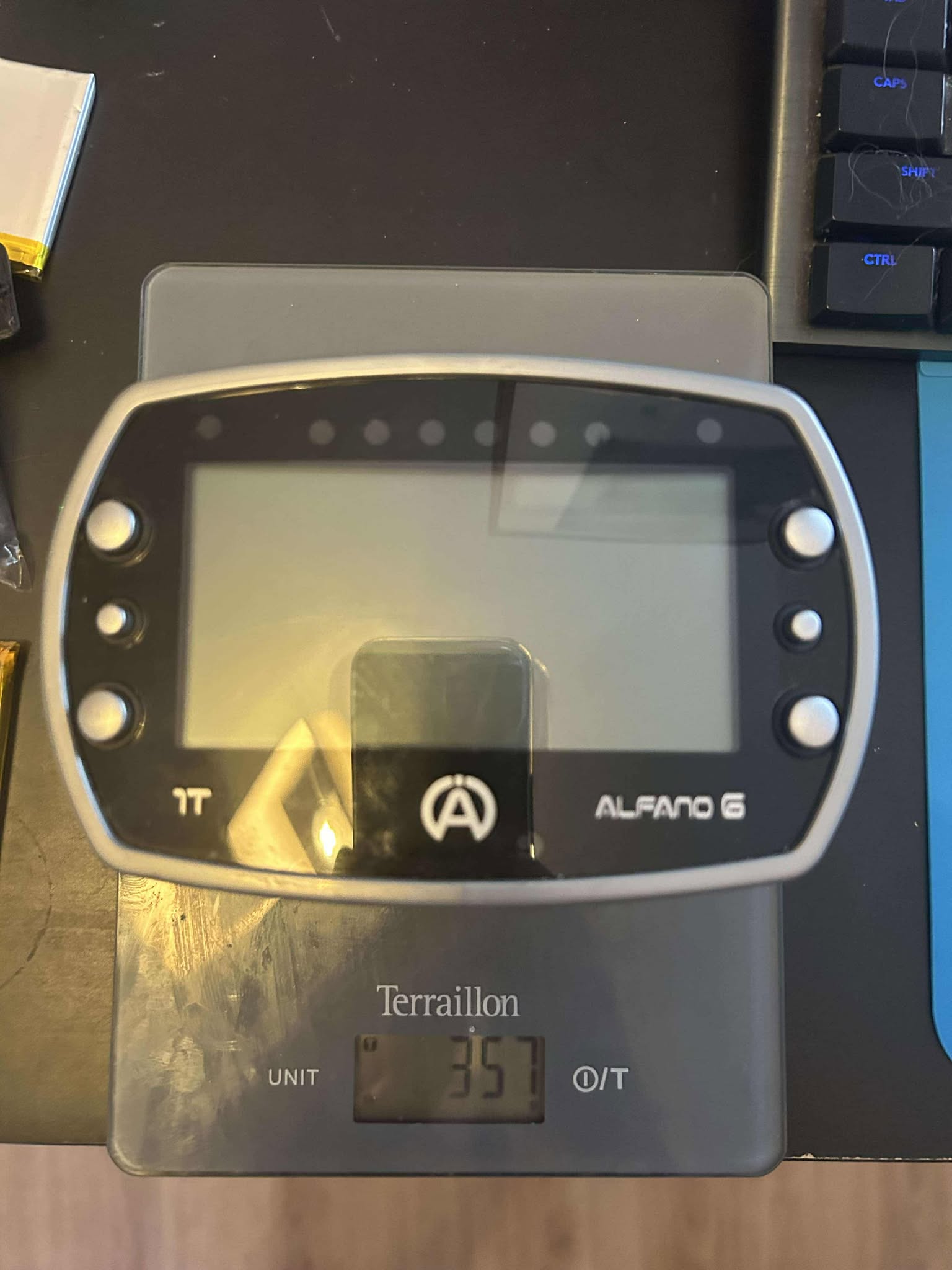
This is very early stage but here are a few photos :
This is awesome. I’m a programmer, but I wouldn’t have the nerve to bite off all of this. I’m particularly wondering and interested in what you’ll do for data analysis, since I feel like right now that’s where I’m locked in the most to the Mychron ecosystem. I’m up for using open source software for it, but after a quick look I’m not even aware of what those packages would be and/or if they exist.
I would have to look more into it, but I think they uses the GPX format. If it is the case, then it should be easy to parse and analyze from many softwares
Would that work with Race Studio Analysis then? If not, I guess another way to put it is - are there actually any DECENT open source or shareware software analysis programs out there, e.g., not just something that can ‘open’ the file? (someone on the other thread mentioned OffCamberData, but that seems to have disappeared off the face of the earth now)
Apparently support for the Micro specifically, as the Micro bluetooth connection is a bit different as the Mini. But in terms of data format, it should be the same
Very impressive. I have dabbled with a few home built wired and wireless sensors to interface with the mychron expansion. Having a mechanical background the electronics and software side was a stretch for me. I can appreciate the skills learned along with the equal parts fun and frustrtration with such an undertaking. Seeing this has given me some extra motivation to finish some of my projects. Thanks for sharing!
Super cool! I am guessing you went with SPI for the display since the esp32 has so few pins. Do you find the display update speed acceptable? I have a little project I am working on and been using an stm32 so I could go 16bit parallel on the display as I was worried about the display speed. But it has no Wi-Fi or Bluetooth built in and requires another chip for that.
Does the ESP32 have CAN support like the STM? The latter I had as part of the ECU design I was working on (Well, had someone working on. It’s a little above my wheelbouse)
Also, from comments I’ve seen I get the sense that CAN support doesn’t necessarily imply plug and play? Do drivers still have to be made for the combination of specific devices, or am I wrong in my interpretation, and it’s pretty much, ‘plug in any CAN device and it’ll just work’?
I didn’t go as far as implementing the screen Waveshare offers a turnkey solution with the screen already wired and the lvgl implementation for the screen and the UI.
Waveshare also added CAN support to the ESP32 @KartingIsLife@calebgilbert but you would have to do the firmware for the devices
@tankyx - thanks, that was my impression. Totally understandable, but I was hoping for something more magical, hehe. It definitely puts doing due diligence in the hands of the user to make sure that whatever you’re hoping to do with your devices is actually going to work.