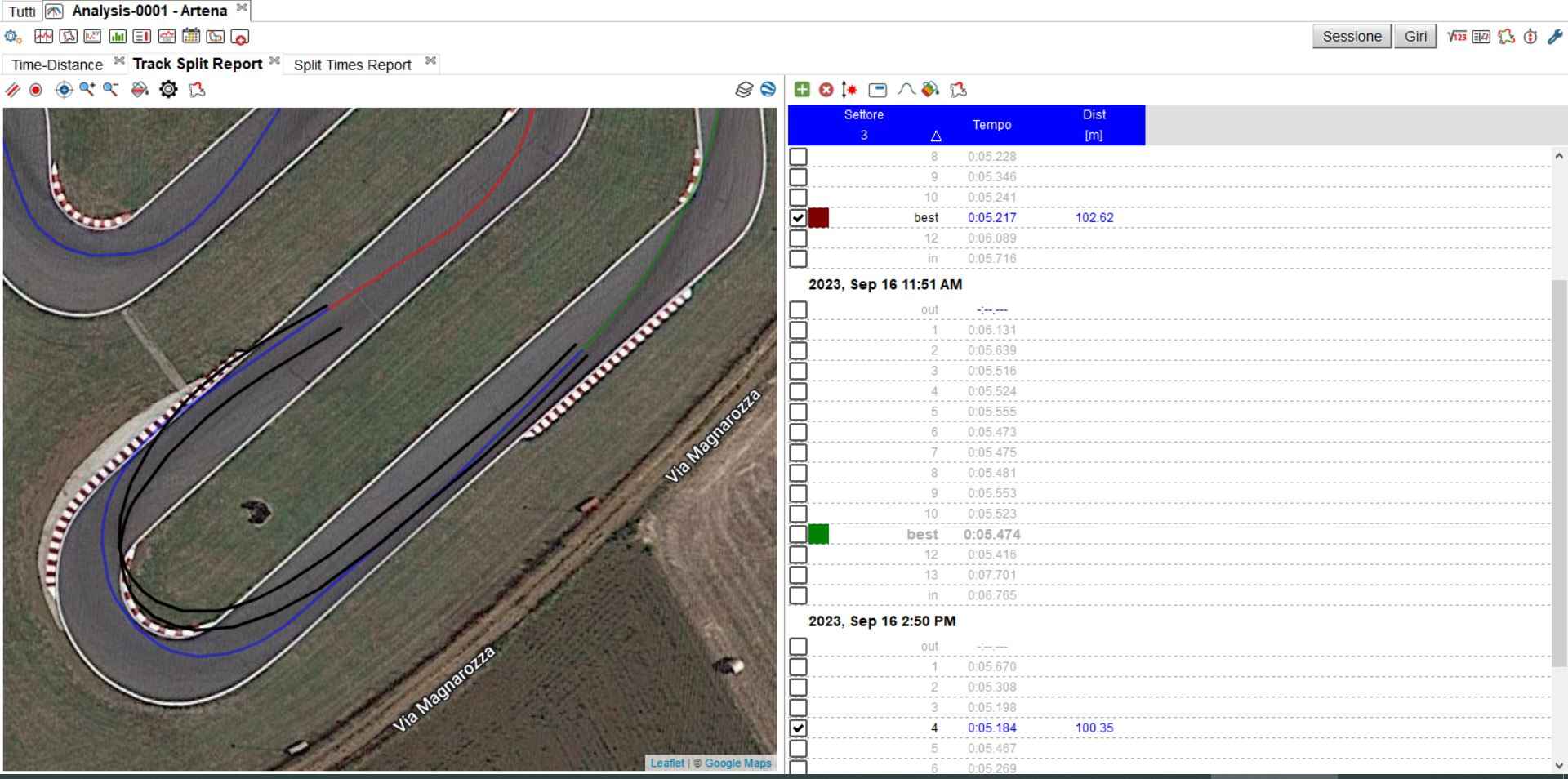
I have a problem when I analyze data with Race Studio 3: as you can see from this photo, the GPS lines (black) is not sync with the track. This happens in all tracks in where I race. In this way is impossible to understand the best line and when I make a mistake. Obviously in every my best laps (so when I stay very close to the inside kerbs), the GPS line goes out of track limits.
How can I correct it? There is a tool in RS3? Is normal or there is a problem with my GPS?
I find the 5S GPS to be too inaccurate to use it for this. I almost never do racing line overlays for this reason. You’re better off looking at GoPro video to analyze if your line is correct.
This really upset me, considering che price of it. There isn’t a way to adapt it? It would be enough to have the possibility of moving the map according to the racing lines to sync them (or vice versa). I think is ridiculous that, from what you say, it’s a known problem and not solved by the manufacturer, thinking that almost all teams in the world championship use Mychron
Its just the reality of GPS technology. Most consumer GPS is only accurate to within a couple meters, and that’s simply not high fidelity enough for dialing in racing lines that need to be accurate to within inches or feet.
I agree with you but for me it’s incredible that in RS3 there isn’t a tool to move the track around the GPS lines. I’m not a programmer but I think it could be quite simple
The track is near Rome so I imagine that in this zone there are good numbers of satellites.
I see the GPS gyro indicator on RS3 but I don’t know how to read it, could you explain something about that?
What I don’t understand is how the channel “GPS PosAccuracy” correlates with traces.
In the above example, PosAccuracy value is 0,47 m but with Google maps ruler, from inside end of the kerb at the apex to the same point in the trace, distance is 1,62 m (without considering that Mychron is in the middle of the kart so at least other 60 cm more inside than kerb apex).
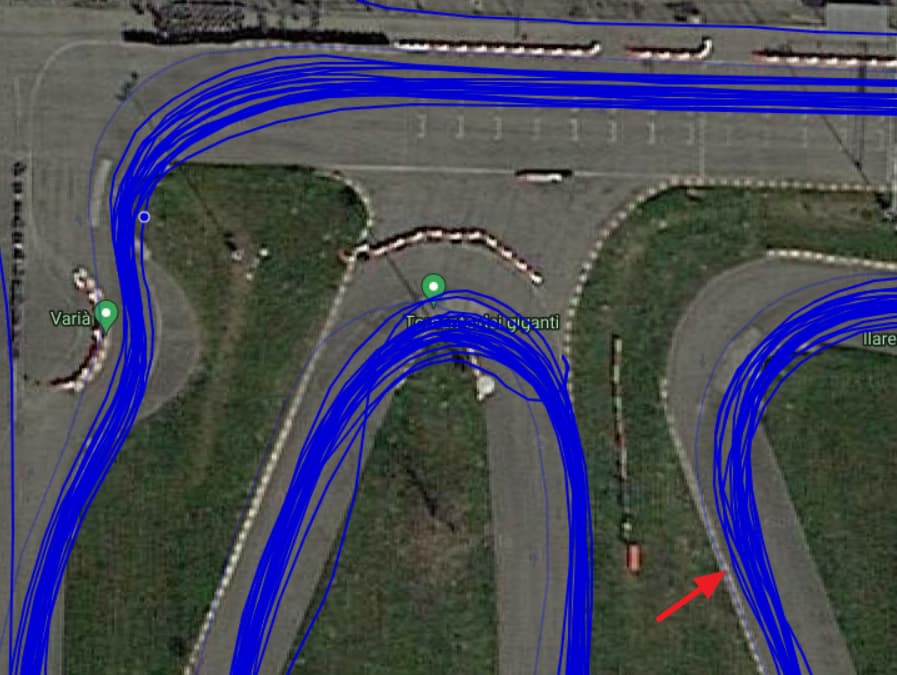
You cannot move the track/trace around, because (at least in my case) error is not systematic (fixed offset), consider for example moving my trace 1,6 m on the left, it would mean that I’m out of track at the bottom right, but I’m sure that I’ve never been out of track there:
This is very important, and makes the situation more ridiculous than it already is: this means that you can’t fix the error because sometimes the GPS is correct, sometimes is out of track, and this happens in totally casual way.
Mi fai sapere, anche in privato o via mail ([email protected]) la risposta di AIM? Mi interessa molto la questione, anche perché il costo dello strumento è giustificato sopratutto dalla presenza del GPS e se questo risulta totalmente inutile a fini di data analisi, sono soldi buttati
I agree with you that’s completely unreliable, at least for trace analysis.
In addition to that consider that AIM advertises Mychron 5S GPS with a much smaller margin of error than Mychron 5, going from 1.5 m to 45 cm. From above images (I’ve found your track as well and checked with Google Maps ruler) we have errors bigger than 2 meters.
Yes there is a large margin of error. On the track where I usually go, from the GPS data it seems that sometimes in the tight hairpin I brake completely on the inside line. Obviously this is total nonsense. In this way all the data becomes useless, and at this point I also begin to have doubts about the reliability of the theoretical time that appears on the dashboard during the lap, and about the live gap compared to the best lap indicated by the LEDs. Let’s see what AIM has to say about that, I will also try to report it to them. Let’s update each other
So I got a response from AIM and they pointed me to this FAQ:
They said also something has improved in RS3 version 3.64.01 which should contains some better GPS alignment. In order to use that function, you need to export and import the session or re-download them from Mychron. I’ve tried both, but to be honest no major changes on my side.
Obviously they also suggested to turn on the unit before going out in order to have GPS already connected to as many satellites as possible and avoid placing cover metal based, including glittered ones, or other unshielded devices/cables close to the Mychron.
The problem is that the GPS accuracy can change from lap to lap, even from corner to corner, so it’s impossible to manupilate the coordinates in a way that is good for each trace
In few words, the GPS trace is totally useless. We have the GPS imprecision due to satellites, and the maps provider imprecision. The question is: the live timing on the dashboard (and the gap between best lap and actual lap) has the same problems?